 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAnalysis of Driving Scenario Trajectories with Active Learning
Aug 06, 2021
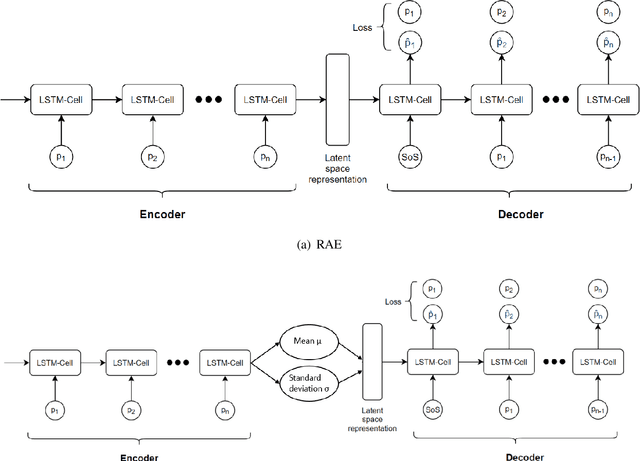
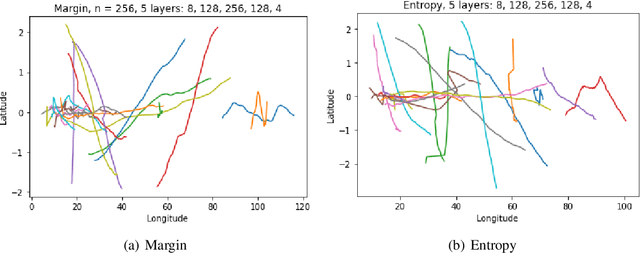
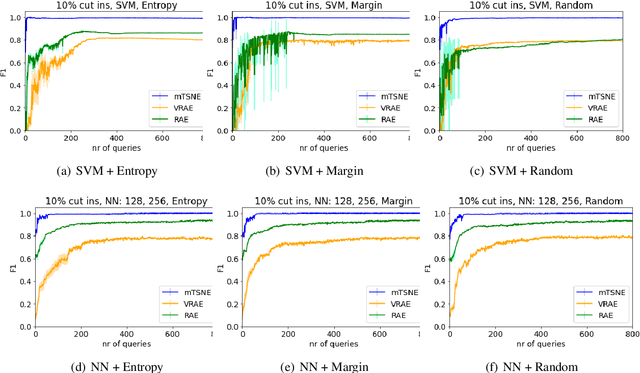
Annotating the driving scenario trajectories based only on explicit rules (i.e., knowledge-based methods) can be subject to errors, such as false positive/negative classification of scenarios that lie on the border of two scenario classes, missing unknown scenario classes, and also anomalies. On the other side, verifying the labels by the annotators is not cost-efficient. For this purpose, active learning (AL) could potentially improve the annotation procedure by inclusion of an annotator/expert in an efficient way. In this study, we develop an active learning framework to annotate driving trajectory time-series data. At the first step, we compute an embedding of the time-series trajectories into a latent space in order to extract the temporal nature. For this purpose, we study three different latent space representations: multivariate Time Series t-Distributed Stochastic Neighbor Embedding (mTSNE), Recurrent Auto-Encoder (RAE) and Variational Recurrent Auto-Encoder (VRAE). We then apply different active learning paradigms with different classification models to the embedded data. In particular, we study the two classifiers Neural Network (NN) and Support Vector Machines (SVM), with three active learning query strategies (i.e., entropy, margin and random). In the following, we explore the possibilities of the framework to discover unknown classes and demonstrate how it can be used to identify the out-of-class trajectories.
A Generic Framework for Clustering Vehicle Motion Trajectories
Sep 25, 2020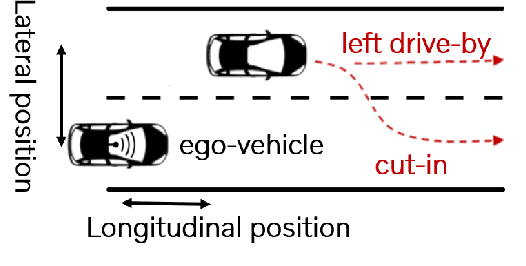
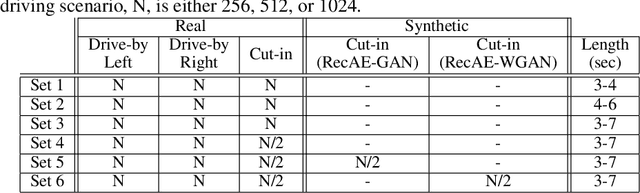
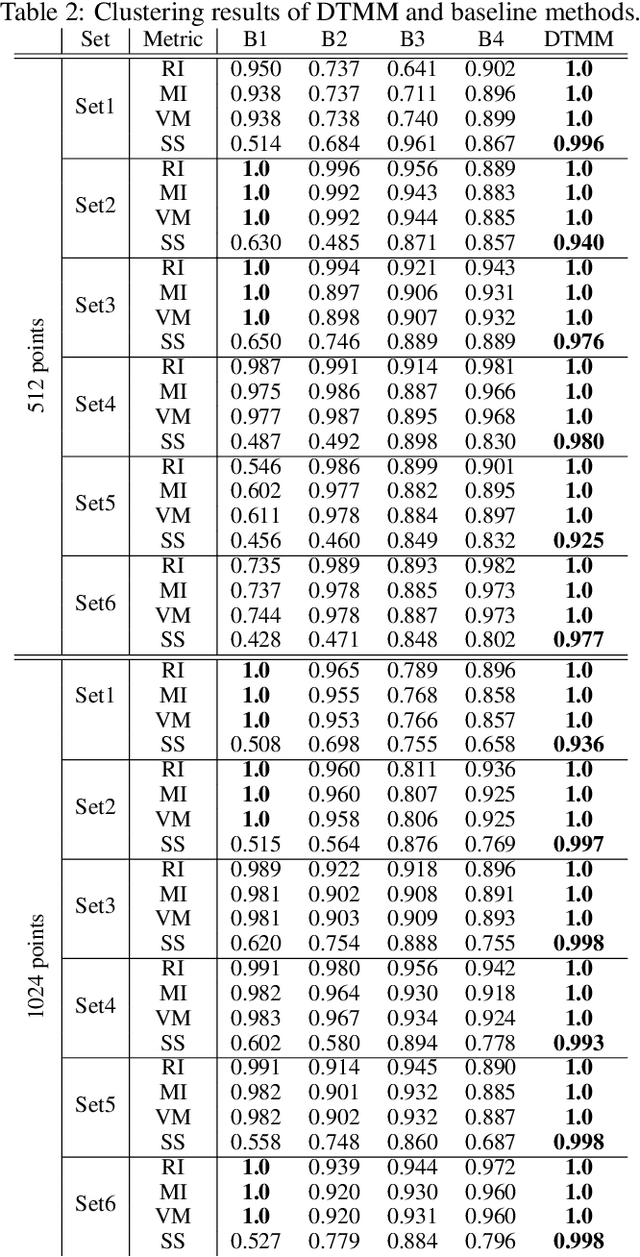
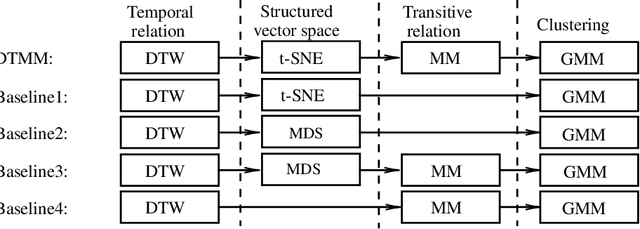
The development of autonomous vehicles requires having access to a large amount of data in the concerning driving scenarios. However, manual annotation of such driving scenarios is costly and subject to the errors in the rule-based trajectory labeling systems. To address this issue, we propose an effective non-parametric trajectory clustering framework consisting of five stages: (1) aligning trajectories and quantifying their pairwise temporal dissimilarities, (2) embedding the trajectory-based dissimilarities into a vector space, (3) extracting transitive relations, (4) embedding the transitive relations into a new vector space, and (5) clustering the trajectories with an optimal number of clusters. We investigate and evaluate the proposed framework on a challenging real-world dataset consisting of annotated trajectories. We observe that the proposed framework achieves promising results, despite the complexity caused by having trajectories of varying length. Furthermore, we extend the framework to validate the augmentation of the real dataset with synthetic data generated by a Generative Adversarial Network (GAN) where we examine whether the generated trajectories are consistent with the true underlying clusters.
A Deep Learning Framework for Generation and Analysis of Driving Scenario Trajectories
Jul 28, 2020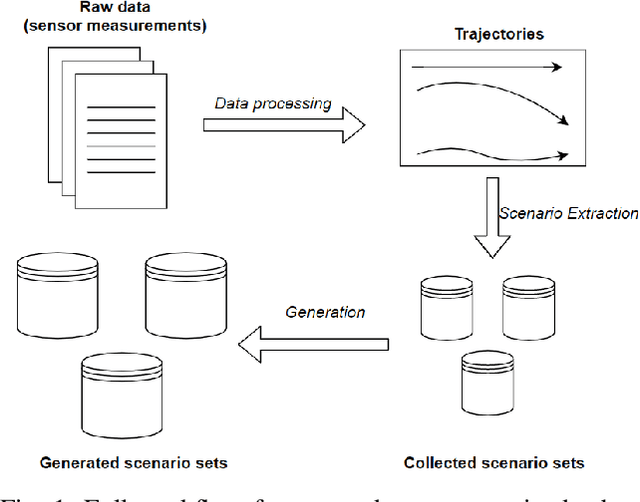
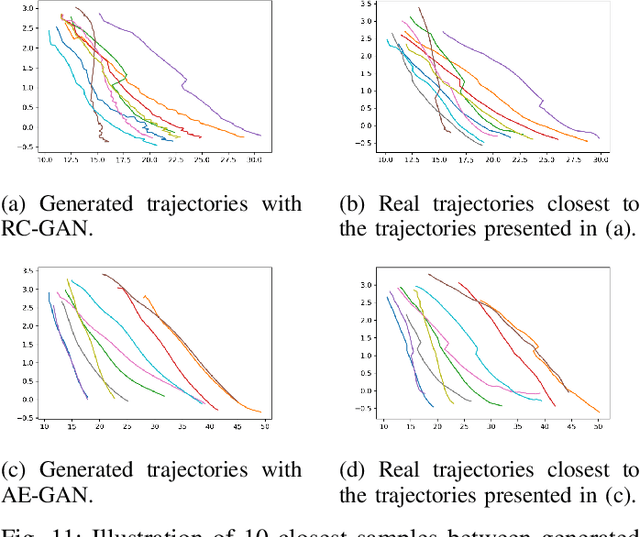
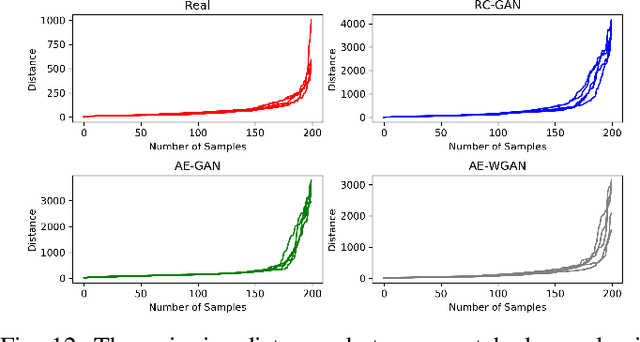
We propose a unified deep learning framework for generation and analysis of driving scenario trajectories, and validate its effectiveness in a principled way. In order to model and generate scenarios of trajectories with different length, we develop two approaches. First, we adapt the Recurrent Conditional Generative Adversarial Networks (RC-GAN) by conditioning on the length of the trajectories. This provides us flexibility to generate variable-length driving trajectories, a desirable feature for scenario test case generation in the verification of self-driving cars. Second, we develop an architecture based on Recurrent Autoencoder with GANs in order to obviate the variable length issue, wherein we train a GAN to learn/generate the latent representations of original trajectories. In this approach, we train an integrated feed-forward neural network to estimate the length of the trajectories to be able to bring them back from the latent space representation. In addition to trajectory generation, we employ the trained autoencoder as a feature extractor, for the purpose of clustering and anomaly detection, in order to obtain further insights on the collected scenario dataset. We experimentally investigate the performance of the proposed framework on real-world scenario trajectories obtained from in-field data collection.